
Robotics Research (2019)

By the summer of 2019, my desire to enter the field of robotics had reached its pinnacle, as had an affinity for biologically-inspired design. Fortunately, I discovered an excellent REU program at the Collaborative Robotics and Intelligent Systems Institute at Oregon State University. The department featured many biologically-inspired research projects, from an artificial spider web that could detect the exact location and intensity of a disturbance, to a surgical implant designed to reproduce lost tendon strength in hands. It also featured other labs focused on topics like soft robotics, human-robot interaction, and grasping and manipulation.
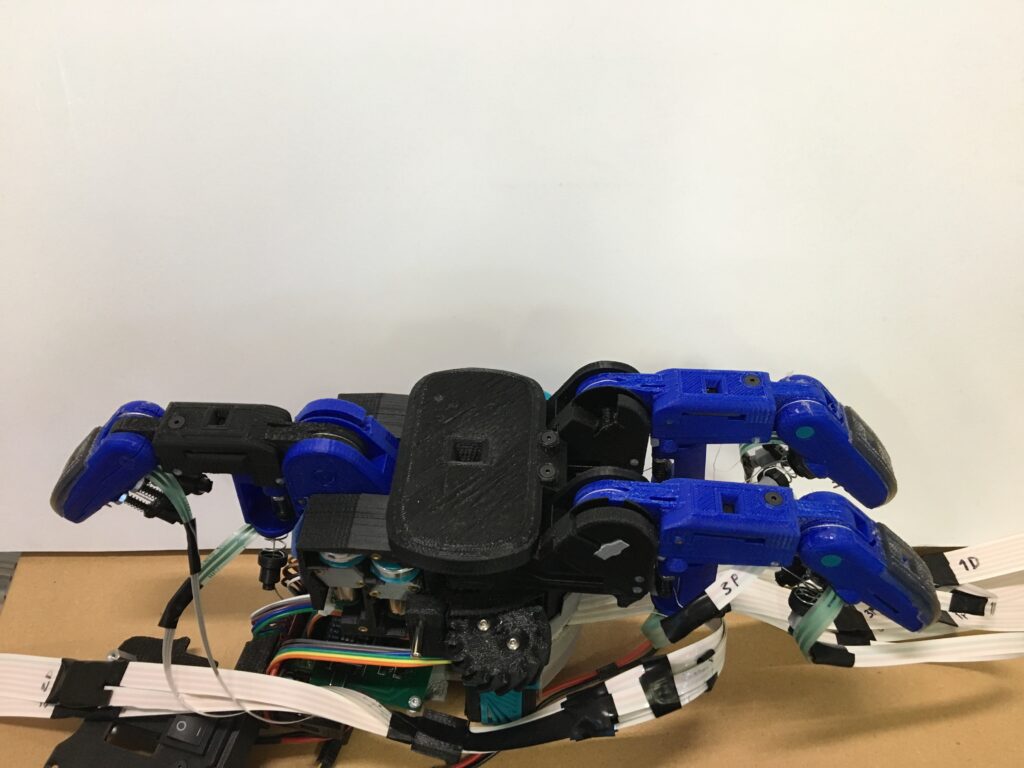
I was brought on under Dr. Cindy Grimm in the grasping lab, and I was tasked with developing the capabilities of a fully-actuated robotic hand for use in a series of automated grasping tasks. These tasks would be designed to evaluate the feasibility and success rate of a variety of novel grasping strategies made possible by full actuation of each finger on the hand. The model had been partially developed with the same geometry of a readily available under-actuated robotic hand, the Barrett Hand, which would act as the baseline for grasping performance. During my time there, I achieved a fully operational and responsive hand that is now being used by the lab for further experimentation. The lab hopes to be able to replicate grasps performed by human subjects using a puppet hand model and achieve high success rates in grasping and manipulation tasks not possible with under-actuated versions of the hand or other end effectors.
The above video shows my early testing after mapping control of the hand to a nanoKontrol MIDI board to allow for fine-tuning and automated positioning.
Insect Flight Research (2018)
In 2018 I was selected into the Research Internships in Science and Engineering (RISE) program offered through the German Academic Exchange Service, and I joined the lab of Dr. Fritz-Olaf Lehmann in the Department of Animal Physiology at Rostock University.
Yes, that’s right, I worked in a biology lab. Despite my mechanical engineering background, my curiosity had been mounting in the area of morphology, trying to understand how biological forms achieve and excel at their function. I view biological evolution as the world’s preeminent engineer and designer, whose work should be studied because it can yield insights for new technology that may advance humanity.
My project involved designing an experimental apparatus and procedure to evaluate how naturally occurring wing damage in house flies affects their flight characteristics. To achieve this, I constructed enclosures for the flies which recorded audio at all hours over the course of several weeks, and periodically performed detailed assessments of individual wing damage. I also developed a method for data and signal processing of the 10+ GB of daily recordings in MATLAB, which ultimately allowed me to determine changes in flight characteristics across the entire lifespan of an organism. By the end of my internship, I had developed a complete procedure for data collection and care and handling of the organisms. My code automatically parsed all sound files and delivered statistics for each hour of every recording including total flight time, average wing beat frequency, average flight bout duration, flight sound amplitude, and more. I also left detailed procedural instructions so that the team could go on to conduct more conclusive analyses of this data and determine how flies adapt to natural wing damage.
This opportunity allowed me to gain important lab experience and develop many technical skills, but it also taught me deeper lessons about working with a team outside of my normal discipline and how to effectively communicate science – even across a language barrier.
Sample MATLAB sections (unfortunately I lost many files after returning home)